الاستخدام العملي للشيفرة الذكية في إنتاج الصور بكميات كبيرة

اكتشف كيف تستخدم العمليات ذات الحجم الكبير PhotoRobot SmartCodes للتحكم المباشر في تسلسلات البرمجيات وتعظيم الإنتاجية في سير العمل الإنتاجي.
تمكين سير عمل أكثر سلاسة باستخدام PhotoRobot SmartCodes
يتضمن سير عمل PhotoRobot SmartCode استخدام ماسح ضوئي لقراءة SmartCodes المطبوعة التي تتيح التحكم المباشر في تسلسلات برامج PhotoRobot. فكر في SmartCodes كرموز تفعيل خاصة، تطلب من البرنامج تشغيل أوامر لمراحل الإنتاج المختلفة. يتيح ذلك لمشغلي خط الإنتاج ببساطة مسح رموز QR أو الباركود لبدء عمليات سير العمل المختلفة.

على سبيل المثال، عادة ما تطبع قاعات الإنتاج الكبيرة التي تستخدم PhotoRobot رموز SmartCodes كملصقات وملصقات لوضعها بالقرب من محطات العمل. وفي حالات أخرى، تستخدم SmartCodes مباشرة على سلاسل المفاتيح، مما يلغي الحركة غير الضرورية في الاستوديو. بعد ذلك، يقوم مسح الرموز بتفعيل مراحل سير عمل مختلفة، من وزن وقياس العناصر إلى الفرز، والترتيب، والتقاط.
لا يوجد حركة ذهابا وإيابا بين محطة عمل روبوتية وحاسوب، مما يسرع خطوط الإنتاج بشكل كبير. الإنتاجية تكون أكبر عندما تكون SmartCodes قريبة جدا من الأشياء التي يمكن تصويرها. في هذه الحالات، يحتاج المشغلون فقط إلى وضع المنتجات على الجهاز، ومسح رمز لإرسال إشارات فورية إلى بدء التسلسلات.
تابع القراءة لمقدمتك حول PhotoRobot SmartCodes، بما في ذلك مثال عملي على استخدامها في قاعات إنتاج الصور الكبيرة.
إنتاج استوديو PhotoRobot النموذجي عالي الحجم
مثال كلاسيكي على قاعة إنتاج كبيرة تستخدم PhotoRobot يستفيد من أن كل محطة عمل تقدم وقت إنتاج يقارب دقيقة واحدة لكل منتج. هذا يعني ما يقارب 500 عنصر لكل وردية مدتها 8 ساعات لكل محطة عمل.
خذ على سبيل المثال خط إنتاج قياسي عالي الحجم يعمل بنظام PhotoRobot.
- في قاعات الإنتاج الأكبر، قد يكون هناك 10 أو 20 أو حتى 60+ محطة عمل روبوتية.
- كل محطة عمل تعمل في نفس الوقت عدة ورديات يوميا.
- هناك 5 مراحل حيوية للإنتاج: المسح والقياس، الفرز والتصميم، الالتقاط الآلي، المعالجة اللاحقة، واجهة برمجة التطبيقات والنشر.
- تنتج قاعة الإنتاج آلاف الأصول في كل وردية، حتى في بيئات المستودعات الطبيعية.
- هناك معارض ثنائية الأبعاد معالجة بالكامل بعد المعالجة، ودورات 360، ونماذج ثلاثية الأبعاد، وفيديو منتجات 360.
بينما يدعم PhotoRobot كل مرحلة من مراحل هذا الإنتاج، هناك رموز PhotoRobot الذكية في مواقع مناسبة حول خط الإنتاج. كل كود يمكن الفرق من تفعيل مراحل مختلفة من سير العمل بسهولة عن طريق مسح الكود عندما يكون جاهزا.

يسمح مسح SmartCodes بالتحكم المباشر في البرمجيات ل:
- وزن وقياس العناصر باستخدام CubiScan.
- قم بفرز العناصر حسب رفوف البرمجيات (العربات) حسب خصائص التصوير الفوتوغرافي والإعدادات المسبقة.
- اجهز العناصر للالتقاط في النظام.
- الروبوتات الالقطيعة.
وفي الوقت نفسه، من الممكن توصيل كل محطة عمل PhotoRobot بالتحكم من واجهة برمجية واحدة.
هناك عملية ما بعد الإنتاج تلقائيا مع التسليم عبر API وتكاملات السحابة، لذا يصبح نشر الملفات تلقائيا وفوريا بعد التقاطها. تختفي العمليات اليدوية ببساطة في الخلفية، مما يضمن لأي موهبة بشرية يمكنها إعادة إنشاء سير العمل بسهولة من خلال مسح SmartCodes.
1 - استخدام SmartCodes في CubiScan لوزن وقياس العناصر
في المراحل الأولى من سير العمل، تستخدم العديد من قاعات الإنتاج SmartCode لوزن وقياس العناصر باستخدام CubiScan. يقوم SmartCode بتجهيز جهاز CubiScan لتسجيل وزن وأبعاد الجسم في النظام. يتيح ذلك الربط التلقائي لمعلومات المنتج على شكل بيانات وصفية بملفات الصور.
في الواقع، عادة ما تطبع صالات الإنتاج رمز سمارت كود كملصق أو ملصق وتضعه مباشرة على أو بالقرب من جهاز CubiScan. يمكن أن يكون كل رمز ذكي إما بصيغة رمز شريطي أو رمز QR.
وفي الوقت نفسه، لكل منتج رمز تعريف فريد خاص به أو SKU، والذي يخبر CubiScan بالعنصر الذي سيتم قياسه.

يتيح ذلك لمشغلي خط الإنتاج ببساطة مسح SmartCode الخاص ب CubiScan، ثم مسح رمز المنتج للعنصر للقياس. ثم يمررون العنصر عبر جهاز CubiScan، ويسجل تلقائيا وزن الجسم وأبعاده في النظام.
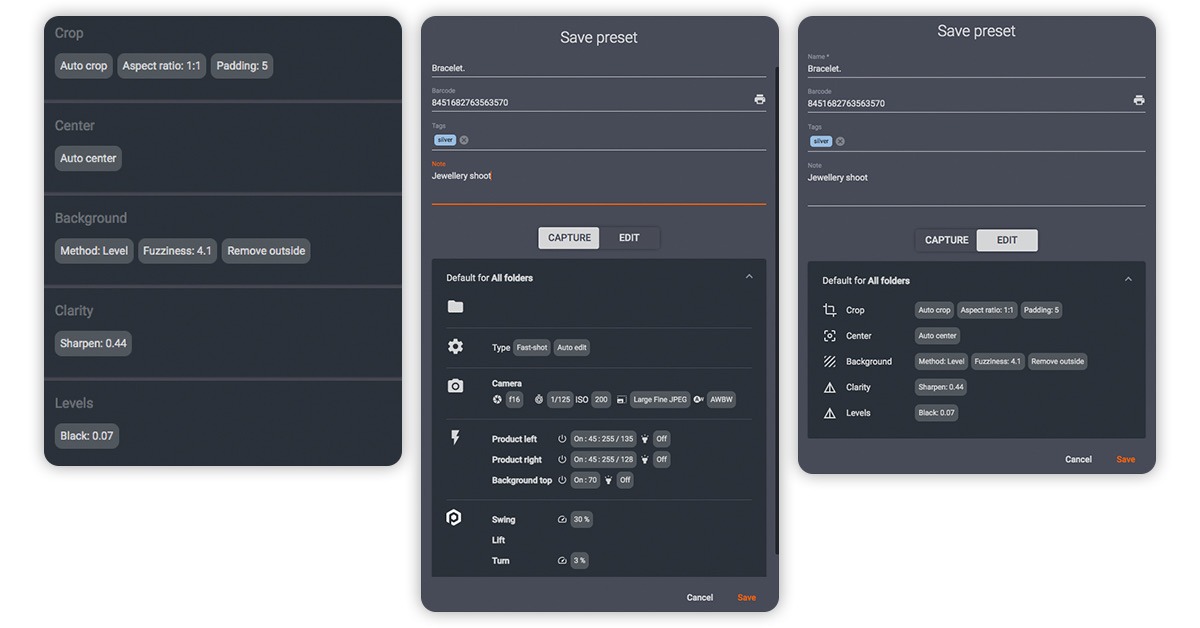
2 - فرز العناصر إلى الرفوف (العربات) عبر SmartCode
ميزة أخرى لسير عمل SmartCode هي فرز العناصر إلى فئات باستخدام رموز الرفوف (cart). في هذه الحالة، هناك رمز ذكي يوجه النظام لبدء فرز العناصر إلى الرفوف (العربات)، وأيضا رمز رف فريد. يخزن كود الرف إعدادات التصوير الفوتوغرافي القابلة للتكوين والإعدادات المسبقة لأنواع مشابهة من العناصر في النظام.
في الواقع، يسمح ذلك بفرز العناصر إلى "رفوف" البرمجيات لتجميع العناصر ذات المتطلبات الفوتوغرافية المشابهة بسهولة وللتصوير الآلي لاحقا.

للقيام بذلك، يقوم المشغل أولا بمسح رمز الذكي، ثم مسح رمز العنصر، وأخيرا مسح رمز الرف المقابل.

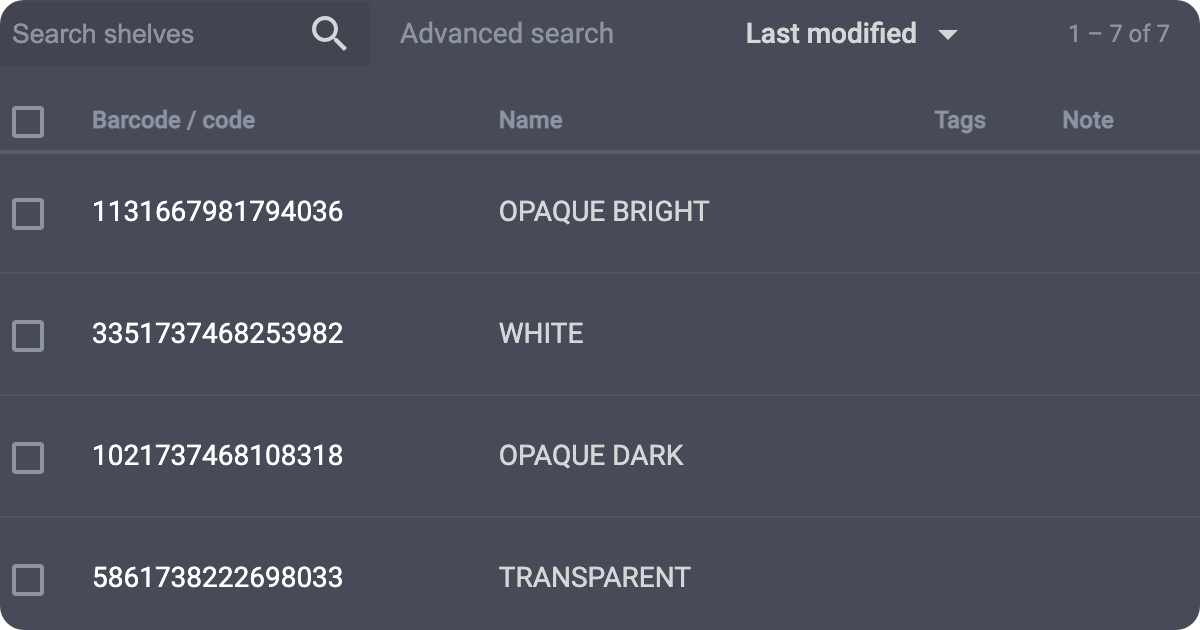
رموز الرفوف ستحتوي على إضاءة التصوير وإعدادات التصوير، بالإضافة إلى أي إعدادات مسبقة إضافية للتصوير وما بعد الإنتاج. خذ على سبيل المثال الإعدادات الخاصة والإعدادات المسبقة لكائنات بألوان مختلفة، شفافية، حجم، وخصائص فريدة. قد تشمل المجموعات الأجسام المعتمة، والأجسام الخفيفة، والأجسام الأكثر تعقيدا مثل الأشياء ذات الأسطح الشفافة أو العاكسة للغاية.
تساعد رموز الرفوف المختلفة فرق الإنتاج على فرز العناصر حسب أدلة الأسلوب، المرحلة، تراكب الصور، والمزيد. الرموز أيضا قابلة للتخصيص بالكامل، لذا يعتمد الأمر فقط على أنواع المنتجات التي سيتم تصويرها.
ثم تضع الفرق رموز الرفوف بالقرب من محطات العمل حيث يجهزون العناصر للتصوير، مثل الوضع مباشرة على رفوف المنتجات والعربات. كلما اقتربت من محطة العمل، أصبحت سير العمل الإنتاجي أكثر سلاسة.
3 - تحديد العناصر للتصوير الفوتوغرافي
بعد فرز المنتجات على الرفوف في البرنامج، يتطلب تحديد المنتج للتصوير فقط مسح الباركود الخاص به. هذه هي المرحلة التي تسبق وضع عنصر على الروبوت. يخبر الباركود الخاص بالعنصر النظام المنتج الذي سيصوره، ورمز الرف الخاص به.

يقوم مسح الباركود الخاص بالعنصر تلقائيا بتوجيه النظام حول عملية الالتقاط والمعالجة الآلية للعنصر. هذا وفقا لرمز الرف / الرف الخاص بالقطعة، ويشمل أي إعدادات مسبقة لإعدادات الكاميرا والإضاءة بالإضافة إلى المخرجات التي يجب التقاطها.
على سبيل المثال، مسح كود المنتج في هذه المرحلة قد يفعل الإعدادات المسبقة لاستخراج صور منتج ثنائية الأبعاد محددة بالتزامن مع دوران 360.

قد يتضمن أيضا تعليمات لتسلسل التقاط من ارتفاعات متعددة حول الجسم لإنتاج دورات ثلاثية الأبعاد ونماذج كائنات ثلاثية الأبعاد.
كل هذه التعليمات مشتقة مباشرة من المرفق السابق لرمز الرف بالعنصر. لذا، يحتاج الفرق فقط إلى مسح الباركود الخاص بالعنصر لتحضير البرنامج لأتمتة التصوير، ثم تجهيز العنصر على الروبوت.
4 - تغيير حالة سير العمل إلى "جاهز للتصوير"
لإبلاغ النظام بأن العنصر جاهز للدخول في سير عمل التصوير، هناك رمز "جاهز للتصوير". مسح هذا الرمز الذكي يغير تلقائيا حالة سير عمل العنصر إلى "جاهز للتصوير" في البرنامج.

وهذا يشير إلى أن مراحل تحضير المنتج قد اكتملت، بما في ذلك أي تحضير إضافي ضروري قبل تجهيز المنتج. خذ على سبيل المثال فك الحزمة، التجميع، التصميم، الترتيب، أو التكوين قبل نقلها إلى خط الإنتاج. في هذه الحالات، غالبا ما يكون هناك من يدير التحضير الإضافي في الجزء الخلفي من سير العمل. لذا، يتطلب النظام طريقة لمديري الكواليس ليشير إلى خط الإنتاج بأن هذا التحضير قد اكتمل. وبهذه الطريقة، يمكن للنظام البيئي بأكمله أن يبدأ العمل كحزمة واحدة متكاملة، مع التركيز على تحقيق أقصى سرعات إنتاج إجمالية.
عندما تكون حالة العنصر "جاهز للتصوير"، يعلم خط الإنتاج أنه يمكنه تجهيز الجسم للصور على محطة عمل PhotoRobot. في قاعات الإنتاج الأكبر، غالبا ما يستخدم ذلك طاولة بدون مركز مع ذراع روبوتية. يتميز الإعداد بنظام ليزر متقاطع لوضع العناصر بسهولة في مركز لوحة الدوران. كما يضمن محاذاة مثالية للذراع الروبوتية وجهاز تشغيل الأسطوانات 360 في جميع الأوقات.
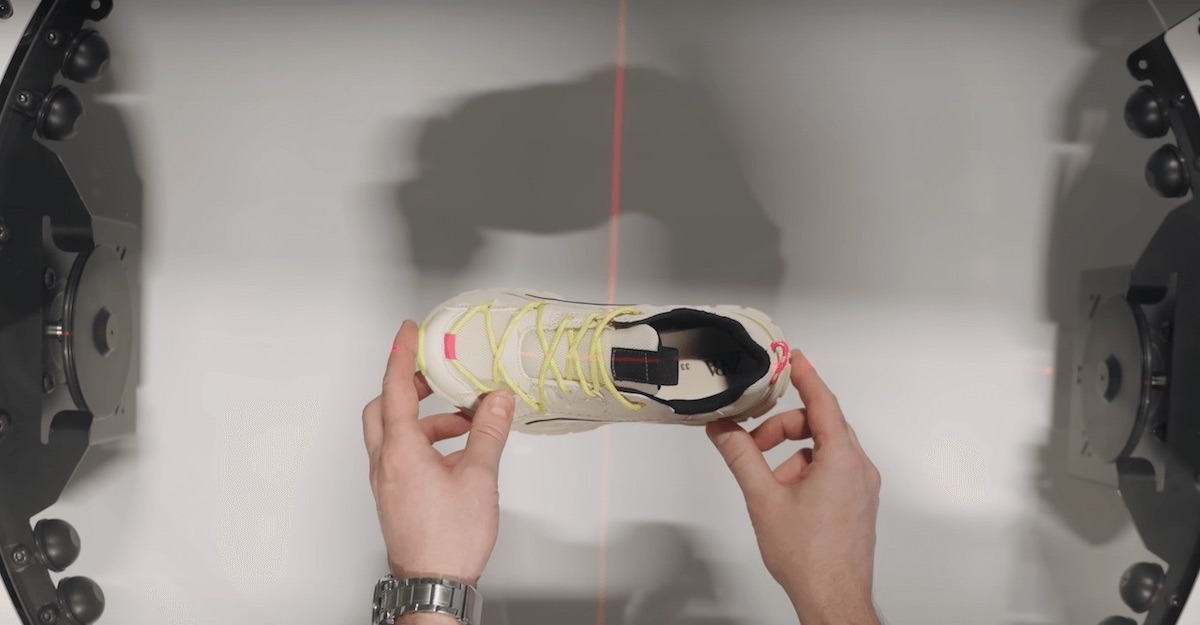
يتطلب تجهيز المنتج وضع عنصر في مركز شبكة الليزر فقط. لاحقا، سينطفئ الليزر تلقائيا قبل تسلسل الالتقاط، والذي يتطلب فقط مسح رمز ذكي آخر للبدء.
5 - بدء أتمتة كاملة للالتقاط عبر SmartCode
وأخيرا، يبدأ الأتمتة الكاملة للالتقاط في سير عمل SmartCode مباشرة بعد تجهيز العنصر على جهاز PhotoRobot. لتسريع هذه العملية، عادة ما يحتوي خط الإنتاج على رمز ذكي لبدء "التسلسل" بالقرب جدا من محطة العمل الروبوتية. هذا يسمح ببدء التسلسل فورا بعد تجهيز الجسم.
غالبا ما يكون ذلك من الوقوف مباشرة عند الجهاز، حيث وضعت قاعة الإنتاج الرمز الذكي للتفعيل الفوري. بدء التسلسل يؤدي إلى إيقاف نظام تحديد المواقع بالليزر، وتشغيل الضبط العمودي التلقائي للكاميرا. في هذه المرحلة، سيتجه مستوى الكاميرا الأفقي أيضا إلى المركز المطلق لارتفاع الجسم.

كل هذا تلقائي بالكامل بفضل التسجيل السابق لقياسات وأبعاد الجسم من CubiScan. ثم، بعد تعديل الكاميرا، تفعل جميع أضواء الاستوديو، والعمليات الروبوتية، وإعدادات الالتقاط دون أن تسأل. تشمل العمليات الإعدادات المسبقة لتوجيه جهاز التشغيل لبدء الدوران، ومشغلات الالتقاط عن بعد متزامنة مع وميضات الاستوديو.

بينما تتبع إعدادات الكاميرا الإعدادات المسبقة، تساعد الوميضات القوية في منع ضبابية الحركة للأجسام. يتيح ذلك التقاط سرعة لإطارات 360 دون الحاجة لإيقاف دوران أجهزة الأسطوانات. بالتوازي، يستطيع الذراع الروبوتية التحرك على مسار عمودي لأتمتة التقاط صفوف متعددة من الارتفاعات. لذا من الممكن بسهولة وسرعة إنتاج لفات متعددة الصفوف، ونماذج ثلاثية الأبعاد، وفيديو منتج بزاوية 360 درجة وفقا لجداول زمنية قابلة للبرمجة. كل ذلك فقط عن طريق مسح رمز ذكي.
الاستمتاع بمرحلة ما بعد الإنتاج التلقائي في الخلفية
بعد التقاط عنصر، تعود أشعة الليزر على الجهاز للعمل على المنتج التالي، وتبدأ معالجة السحابة دون أن يسأل. كما أن مرحلة ما بعد الإنتاج تتم بالكامل في الخلفية داخل السحابة، لذا لا يوجد انتظار بين التصوير والمعالجة اللاحقة.

خطوط الإنتاج ببساطة تكرر سير عمل SmartCode من هنا. يحضرون العنصر التالي للتصوير، ويمسحون الباركود الخاص به، ويجهزونه حسب SmartCode، ثم يمسحون البداية لالتقاط ومعالجته وحتى نشره.
بفضل دمج CubiScan مع رموز الرفوف / الرفوف وSmartCodes، أصبحت جميع مراحل الإنتاج متصلة بالكامل. هناك نسخة احتياطية للصور الأصلية فور التقاطها، بينما تعمل إزالة الخلفية وتحسينات الصور وفقا للإعدادات المسبقة.
وفي الوقت نفسه، تطلب الإعدادات المسبقة من البرنامج تخزين الملفات إما محليا في مجلد مشترك، أو للرفع تلقائيا. قد تنشر الملفات فور التقاطها في PhotoRobot Cloud، أو عبر واجهة برمجة التطبيقات إلى خلاصات تصدير التجارة الإلكترونية. وفي الوقت نفسه، يقوم خط الإنتاج بتصوير الدفعة التالية من المنتجات.
استفد بالكامل من سير عمل SmartCode
في النهاية، يمثل سير عمل PhotoRobot SmartCode ليس فقط سرعات الإنتاج الفريدة ل PhotoRobot. علاوة على ذلك، يظهر كيف يدعم PhotoRobot جميع أجزاء سير عمل الاستوديو، من الكواليس إلى خط الإنتاج. تساعد SmartCodes النظام البيئي بأكمله على العمل كوحدة واحدة – من خلال ربط كل مرحلة من مراحل الإنتاج بمعالجة ونشر البيانات المؤتمتة بالكامل. يركز البرنامج على تحقيق أقصى سرعات إنتاج إجمالية، من دخول المنتج إلى الخروج من المنتج.
لمزيد من المعلومات حول دمج SmartCodes في سير عملك، راجع دليل مستخدم PhotoRobot SmartCodes. ستجد أكواد ذكية جاهزة للطباعة، ووثائق تقنية، وخطوات لتسهيل دمج المواهب البشرية لدورات إنتاج أكثر سلاسة.



