دليل الاستخدام الأول للممشى الافتراضي PhotoRobot

يوفر هذا الدليل معلومات تقنية لفهم المنصة الافتراضية PhotoRobot والتشغيل الوظيفي. يهدف إلى دعم عملاء PhotoRobot الذين اشتروا أجهزتهم مؤخرا، وتبسيط عملية الانضمام إلى التكنولوجيا الجديدة. يشمل ذلك نظرة عامة عامة على جهاز الممر الافتراضي، وتعليمات لتوصيل الجهاز بالشبكة، وخطوات الاستخدام الأول للنظام.
ملاحظه: دائما راجع معلومات وتعليمات السلامة الخاصة ب PhotoRobot بالإضافة إلى الدليل المرفق مع جهازك قبل الاستخدام الأول.
مهم: يجب دائما تنفيذ التركيب الأولي لجهاز PhotoRobot بواسطة سلطة معتمدة ل PhotoRobot. الجهات المختصة بتركيب PhotoRobot هي موزع معتمد، أو ممثل الشركة المصنعة نفسها.
دليل الاستخدام الأول لممشى PhotoRobot
شكرا لك ومبروك على شرائك لعرض PhotoRobot Virtual Catwalk. يمثل جهازك PhotoRobot عقودا من الخبرة المباشرة والبصيرة والابتكار في التصوير الفوتوغرافي الآلي. تصميمه أيضا يأخذ في الاعتبار عملك وكل عميل فريد من نوعه. PhotoRobot قابل للتعديل لدعم حالات استخدام واسعة النطاق، حيث تساعد كل حالة محددة في تقديم فائدة لمنظومة PhotoRobot بأكملها. استخدم الوثائق التالية للتعرف على حل PhotoRobot، وللحصول على تعليمات حول الاستخدام الأول لجهازك.
إذا واجهت مشاكل، راجع PhotoRobot Problemshooting للحصول على حلول للمشاكل الشائعة في الأجهزة، والروبوتات، والكاميرات، والإضاءة، والتحرير، ومرحلة ما بعد الإنتاج.
1. وصف الجهاز - PhotoRobot Virtual Catwalk
الممر الافتراضي ل PhotoRobot الذي يعمل يصبح منصة عرض لا نهائية بزاوية 360 درجة لتصوير الأزياء والفيديو. يتكون الجهاز من جهاز مشي فوق منصة دوارة تدور 360 درجة. وفي الوقت نفسه، تبقى الكاميرات في مكانها حول المنصة، مما ينتج عنه صور وفيديوهات مع تأثير كاميرا طائرة. محطة العمل مناسبة لتصوير المنتجات بتقنية 360 درجة باستخدام النماذج أو تصوير الأجسام متوسطة إلى كبيرة الحجم عندما لا يكون الحزام يعمل. كما يوجد دخول وخروج سهل من المنصة، مع سرعة قابلة للتعديل لمزيد من الاستقرار أثناء الحركة.

تشمل الميزات التكنولوجية الرئيسية لممشى PhotoRobot المرتفع:
- تحكم حركة قابل للتخصيص (مع ضبط دوران الطاولة عن بعد وسرعة جهاز المشي من 0 إلى 10 كم/ساعة ليناسب أي موديل تماما).
- سهولة الدخول والخروج (مع تثبيت لوحة عريضة لمنصة الدوران بدعامات لمزيد من الاستقرار والأمان).
- كل شيء في مكان واحد (دون الحاجة للانتقال إلى الأماكن أو الخروج من الموقع).
- مستوى قابل للتعديل (مع إمكانية تركيب الممر المرتفع مباشرة في الأرضية ليكون مستويا مع منطقة العمل).
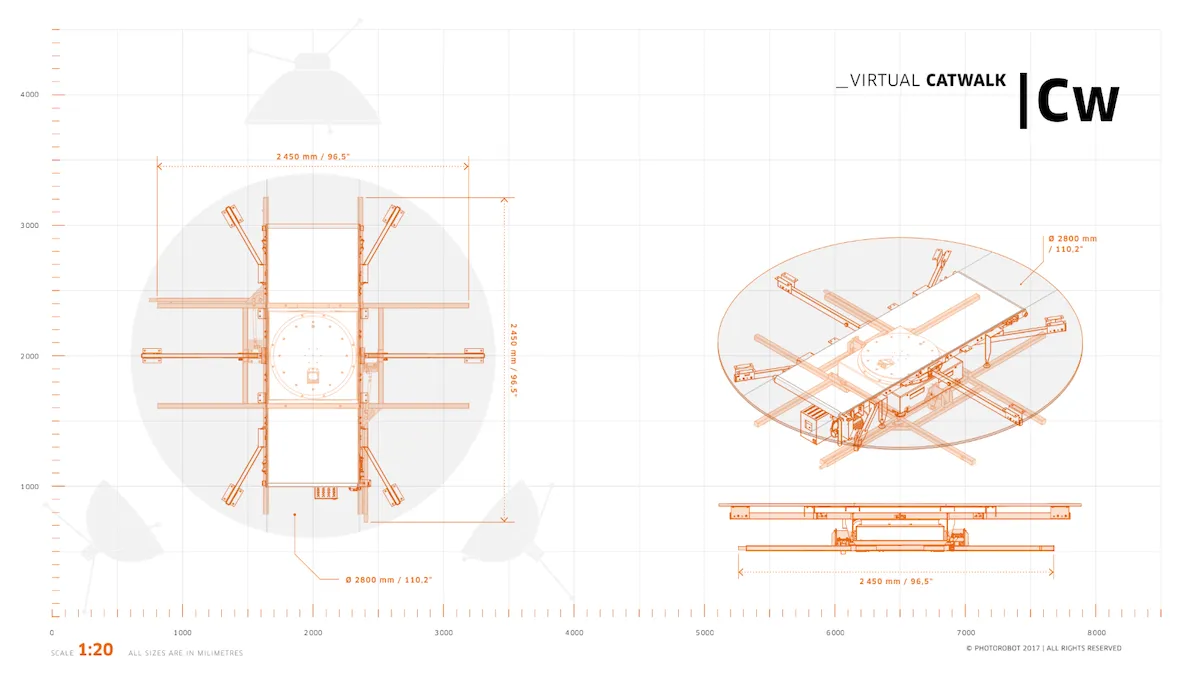
1.1 نظرة عامة على الجهاز - الممر الافتراضي
يتسع PhotoRobot Virtual Walkwalk في مساحة 7 × 7 أمتار، ويغطي ديناميكيات دوران لوحة الدوران مع حزام المشي. هذا يتيح اتجاهين للحركة. هناك حركة الحزام الشبيه بجهاز المشي، ثم المنصة الدوارة التي تستطيع الدوران في نفس الوقت أثناء تشغيل الحزام. وفي الوقت نفسه، يوفر التحكم الكامل في الاتجاه وسرعة الحركة مع دعامات الحواف المتحركة الأمان والاستقرار أثناء تشغيل الجهاز.

1.2. المكونات الرئيسية للممشى الافتراضي
1.2.1. محرك دفع ضخم في الجهاز يتيح التحكم القابل للتعديل في سرعة جهاز المشي من 0 إلى 10 كم/س، ويقود دوران المنصة بزاوية 360 درجة.

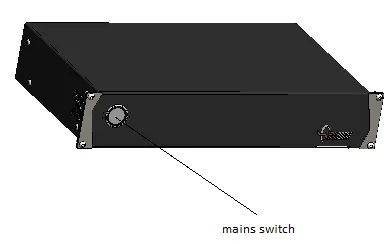
1.2.2. لاحظ أن موقع وحدة التحكم ليس داخل الممشى المرتفع. بدلا من ذلك، تكون وحدة التحكم منفصلة عن الجهاز، وعادة داخل غلاف رف مخصص لجهاز PhotoRobot HD.
1.2.3. إذا لم يكن الجهاز مستخدما لتسجيل الفيديو، فمن الممكن إزالة الحزام واستخدام جهاز التشغيل الدوارة لتصوير المنتجات بتقنية 360 درجة. هذا ممكن في وضع RotoPower، وأيضا بالاقتران مع توسعة اختيارية لذراع الروبوت PhotoRobot.

2. قبل الاستخدام الأول لممشى PhotoRobot
قبل الاستخدام الأول ل PhotoRobot، من الضروري فهم طبيعة حل PhotoRobot. PhotoRobot هو وحدة معيارية تتكون تقنيا من مكونات الأجهزة والبرمجيات. وهذا يتطلب أن يكون لدى PhotoRobot اتصال بنفس الشبكة التي يشغل فيها الحاسوب.
مهم: يرجى دائما الرجوع إلى PhotoRobot First Use & Basic Test للحصول على متطلبات التشغيل التقنية والتعليمات حول توصيل PhotoRobot بالشبكة.
بشكل عام، يجب استيفاء المتطلبات المسبقة للعمليات التالية.
- يجب أن تتصل وحدة التحكم بالشبكة المحلية.
- يجب أن يقوم الكمبيوتر بتشغيل واجهة المستخدم الرسومية للخدمة أو برنامج المشغل المسمى _Controls.
- يجب أن يتصل الكمبيوتر عبر نفس الشبكة مثل وحدة التحكم.
- يجب أن يكون هناك اتصال إنترنت يعمل عبر الشبكة.

بالإضافة إلى ذلك، يجب أن تكون معايير نظام توزيع الكهرباء متوافقة (مثل الجهد والتردد). للقيام بذلك، استخدم موصل RJ45 في الجزء الخلفي من وحدة التحكم. إذا لم يكن إعداد وحدة التحكم متوافقا، قم بإعداده أولا. للقيام بذلك، ابحث عن محدد الجهد اليدوي في الجزء الخلفي من وحدة التحكم. ثم قم بتوصيل وحدة التحكم بالشبكة عبر كابل إيثرنت باستخدام موصل RJ45.

ثم هناك متطلبات تكوين الشبكة التالية لتشغيل الممر الافتراضي.
- خادم DHCP في الشبكة إلزامي.
- يجب السماح باتصال منافذ TCP 7777 ، 7778.
- يجب السماح ببث UDP على المنفذ 6666.
- الاتصال بالإنترنت إلزامي.
- *. يجب السماح بالوصول photorobot.com.
- يجب السماح بالوصول as-unirobot.azurewebsites.net.
- راجع المتطلبات المسبقة والتكوين لشبكة PhotoRobot للتأكد من الإعداد الصحيح وللاستكشاف عند الحاجة.
- قم بتوصيل قابس الطاقة بمقبس الطاقة.
وأخيرا، اضغط على مفتاح التيار الرئيسي في وحدة التحكم. عندما يتغير الحالة، يتوقف الضوء عن الوميض ويصبح ضوءا مستمرا، مما يشير إلى أن وحدة التحكم جاهزة للعمل.
2.1. ابحث عن عنوان IP الخاص ب PhotoRobot على الشبكة المحلية
لتحديد عنوان IP الخاص ب Virtual Catwalk وأجهزة PhotoRobot الأخرى، يتم دمج تطبيق PhotoRobot Locator مباشرة داخل CAPP. هذا يسمح بالبحث والتعرف على وحدات التحكم بسهولة على الشبكة دون الحاجة لاستخدام تطبيقات خارجية. تأكد من أنك تستخدم أحدث إصدار من CAPP للوصول إلى هذه الميزة.
ثم، لتحديد روبوت على الشبكة مباشرة داخل CAPP، افتح النسخة المحلية من CAPP، اذهب إلى الإعدادات، واضغط على روبوتات / وحدات تحكم.

تعرض قائمة الروبوتات / وحدات التحكم أعمدة تحتوي على الاسم، الشبكة، الوحدة، النسخة، المكتشف، والتعريف لكل روبوت. إذا كانت النقطة على يسار اسم الروبوت خضراء، فهي متصلة. النقر على حقل الروبوت سيفتح واجهة موقع الروبوت الإلكتروني. سيجعل هذا أيضا ضوء LED على وحدة التحكم في الروبوت يومض باللون الأخضر لتسهيل التعرف عليه.
إذا كان العميل يتطلب تحميل التطبيق من الخارج، فإن PhotoRobot Locator متاح أيضا للتحميل عبر iOS ضمن تنزيلات حساب PhotoRobot.

ملاحظة: تم إيقاف إصدار أندرويد من PhotoRobot Locator.
بدلا من ذلك، هناك أداة سطر الأوامر FRFind لنظام MacOS أو Windows للبحث في الشبكة وتحديد وحدات التحكم في PhotoRobot. اعثر على روابط لتحميل FRfind أيضا من خلال صفحة تنزيلات حساب PhotoRobot.
ثم، بعد العثور على جهاز PhotoRobot، انسخ عنوان IP والصق عنوان IP الخاص ب PhotoRobot في أي متصفح ويب بصيغة URL. إذا نجحت، سيتم إطلاق واجهة Service GUI، والتي ستعرض واجهة مستخدم أساسية لاختبار PhotoRobot.
2.2. تشغيل ممر PhotoRobot
في واجهة الخدمة الخاصة بالجهاز، شغل المحرك بعد ذلك باستخدام زر الطاقة الأخضر Motor ON.

2.3. إجراء اختبارات أساسية لممر PhotoRobot Catwalk
أخيرا ، لاختبار ما إذا كان PhotoRobot يعمل بكامل طاقته ، استخدم عناصر التحكم في واجهة واجهة المستخدم الرسومية للخدمة لتحويل النظام الأساسي إلى أي زاوية مرغوبة.

- شغل المحركات (السهم 1)، حاول الدوران (السهم 2).
- إذا اتبع الروبوت تعليمات الحركة، يكون جهاز PhotoRobot جاهزا للعمل المنتظم.
3. برامج PhotoRobot _Controls
يوفر تطبيق PhotoRobot _Controls البرنامج التحكم في محطة العمل الروبوتية Virtual Catwalk بأكملها. يتضمن ذلك التحكم عن بعد على جميع الروبوتات والكاميرات والإضاءة. يدير البرنامج سير العمل ويوفر الوظائف اللازمة للأتمتة الفعالة في مجال المعالجة اللاحقة.

مهم: برنامج تطبيق PhotoRobot _Controls متاح للتحميل عبر حسابك PhotoRobot. ولا يتم تضمينها مع توصيل الآلة؛ يتم شراؤه بشكل منفصل عن الجهاز.
ملاحظه: للحصول على معلومات مفصلة وتعليمات تقنية حول استخدام PhotoRobot _Controls البرمجيات، راجع PhotoRobot البدء.
4. ملصقات المعلومات
4.1. نظرة عامة على الرموز

4.2. ملصقات الآلة والمكونات
للحصول على ملصقات لآلات ومكونات محددة، يرجى الرجوع إلى مستند معلومات وتعليمات السلامة PhotoRobot في قسم ملصقات المعلومات (3.1).


سلسلة EOS Rebel


سلسلة EOS DSLR


سلسلة EOS M عديمة المرآة


سلسلة PowerShot


لقطة مقربة / محمولة باليد

توفر سلسلة EOS Rebel من Canon كاميرات DSLR سهلة الاستخدام للمبتدئين بجودة صورة قوية وعناصر تحكم بديهية وميزات متعددة الاستخدامات. مثالية لعشاق التصوير الفوتوغرافي ، توفر هذه الكاميرات تركيزا بؤريا تلقائيا موثوقا به وشاشات لمس متغيرة الزوايا وتسجيل فيديو عالي الدقة أو 4K.
اتصال
القرار (MP)
دقة
توفر سلسلة EOS DSLR من Canon صورا عالية الجودة وتركيزا بؤريا تلقائيا سريعا وتعدد الاستخدامات، مما يجعلها مثالية لكل من التصوير الفوتوغرافي وإنتاج الفيديو.
اتصال
القرار (MP)
دقة
تجمع سلسلة EOS M Mirrorless Series من Canon بين التصميم صغير الحجم والأداء الشبيه بكاميرا DSLR. تتميز هذه الكاميرات بعدسات قابلة للتبديل وضبط تلقائي للصورة سريع ومستشعرات صور عالية الجودة ، وهي رائعة للمسافرين ومنشئي المحتوى الذين يبحثون عن قابلية النقل دون التضحية بجودة الصورة.
اتصال
القرار (MP)
دقة
توفر الفئة PowerShot Series من Canon كاميرات صغيرة الحجم وسهلة الاستخدام للرماة العاديين والمتحمسين. مع الطرز التي تتراوح من كاميرات التأشير والتصوير البسيطة إلى كاميرات التكبير المتقدمة ، فإنها توفر الراحة وجودة الصورة القوية وميزات مثل تثبيت الصورة والفيديو بدقة 4K.
اتصال
القرار (MP)
دقة
تم تصميم الكاميرات المقربة والمحمولة باليد من Canon للتصوير الفوتوغرافي والفيديو التفصيلي عن قرب. فهي صغيرة الحجم وسهلة الاستخدام ، وتوفر تركيزا دقيقا وتصويرا عالي الدقة وإمكانيات ماكرو متعددة الاستخدامات - مثالية لمدونات الفيديو وتصوير المنتجات واللقطات المقربة الإبداعية.
اتصال
القرار (MP)
دقة


